Всем помехам вопреки
 Talon-A отделяется от носителя.
Talon-A отделяется от носителя.В прошлом месяце издание Defense News сообщило о том, что американская компания Northrop Grumman испытала технологию навигации и маневрирования в реальном полете гиперзвукового аппарата в условиях отсутствия сигналов от американской космической навигационной системы Global Positioning System (GPS). Проверка была проведена в двух последних экспериментальных полетах планирующего аппарата Talon-A, который оснастили особым инерциальным измерительным блоком. И есть основания полагать, что Northrop Grumman применила новый микрогироскоп на основе эффекта ядерного магнитного резонанса (micro-NMRG).
Отчего же Northrop Grumman так гордится своим достижением? Казалось бы, оснащение высокоточного оружия только спутниковыми навигационными приемниками является лучшим вариантом. Их компактность, надежность, низкая стоимость очень привлекательны.
 Micro-NMRG.
Micro-NMRG.Но существенным недостатком систем глобального позиционирования и навигации является то, что они работают лишь при наличии спутниковых сигналов. А сигналы эти могут отсутствовать в некоторых местах, их могут глушить, искажать. В конце концов, навигационные спутники могут вывести из строя. Вот почему полагаться на возможность навигации с использованием только спутниковых приемников нельзя.
Помехи и подавление спутниковых сигналов
Подавление или искажение спутниковых сигналов наиболее эффективно в момент приема навигационных данных бортовым комплексом управления той же ракеты, потому что он в это время доступен для враждебного информационного воздействия.
По некоторым данным, иракские военные во время войны 2003 года глушили GPS. Тогда в цели попадали только две крылатые ракеты «Томагавк» из 40 и 30% управляемых бомб. Дело в малой мощности сигнала, приходящего к навигационному приемнику, установленному на ракете, с расположенного на расстоянии более чем в 20 тыс. км спутника. Так что даже не очень мощный передатчик может обеспечить глушение сигналов.
Но более эффективными могут быть электронные так называемые спуфинг-атаки на навигационную систему. Противник при этом посылает сымитированные навигационные сигналы, выдавая ложные спутниковые данные, которые воспринимаются приемником как истинные. В результате объект, оборудованный спутниковой навигационной системой, сбивается с курса.
Осуществить такое воздействие может любая система ПВО. И не только. В 2013 году студенты-хакеры из университета города Остин в штате Техас сбили с курса большую яхту с помощью обыкновенного ноутбука. Есть предположение, что именно с помощью спуфинг-атаки Иран в декабре 2012 года посадил в заданном месте на своей территории американский секретный беспилотник RQ-170 Sentinel стоимостью в десятки миллионов долларов США.
Артиллерийские высокоточные снаряды Excalibur, оборудованные приемником сигналов GPS, в первые месяцы специальной военной операции (СВО) доставляли много проблем нашей армии. Со временем против управляемых 155-мм снарядов научились проводить спуфинг-атаки. В результате эти высокоточные снаряды превращались в обычные с отклонением на предельной дальности в несколько десятков метров. В управляемом режиме он должен попадать в щит размером 4 на 4 метра. При этом стоит такой снаряд под $70 тыс., а неуправляемый — меньше $1000. В итоге такие снаряды, видимо, перестали поставлять Украине.
А исследователи из Университета Карнеги Меллон и компании Coherent Navigation разработали три типа атак, способных вывести из строя инфраструктуру GPS. В частности, они создали гибридный приемо-передатчик PCSS (Phase-Coherent Signal Synthesiser). В процессе проведения атак устройство принимало реальные GPS-сигналы и превращало их во вредоносные сигналы.
Повышение надежности приема сигнала
Считается, что надежность и устойчивость передачи спутниковых навигационных данных может обеспечиваться за счет применения шумоподобных сигналов. Впервые возможность их использования была продемонстрирована в 1972 году. В такой системе все космические аппараты излучают сигнал на одной несущей частоте, но она модулируется сверхдлинным псевдослучайным кодом, индивидуальным для каждого спутника. Спектр такого сигнала похож на спектр случайного шума, отчего такой сигнал и получил название шумоподобного.
Использование для формирования таких сигналов псевдослучайного кода позволяет значительно увеличить помехоустойчивость и передавать информацию о положении спутников и метки точного времени. Также при применении такого кодирования легко решается проблема ограничения доступа, поскольку коды могут быть как открытыми, для общего пользования, так и секретными, предназначенными для целевых пользователей.
Гражданским пользователям доступны только открытые коды. Достаточно по команде с наземного пункта управления внести преднамеренные погрешности в информацию, передаваемую открытыми кодами, как работоспособным останется только военный сегмент. Гражданские же приемники перестанут функционировать с приемлемой точностью. Уверенность в надежности таких сигналов обуславливает широкое применение спутниковых навигаторов, в том числе автомобильных.
Со времени агрессии НАТО против Югославии в 1999 году американцы стремятся улучшить помехозащищенность GPS, применяя все более сложные коды и засекречивая их. Они эксплуатируют спутники с новыми радиопередатчиками, мощность сигнала которых увеличена в 8 раз, которые имеют более высокую устойчивость к атмосферным помехам, а также к помехам, намеренно создаваемым возможным противником. Но значительно поднять мощность сигнала со спутника нельзя, а секретные коды выявляются, например, при записи сигнала со спутника с помощью радиотелескопов.
Исследования, проведенные в период создания нашей глобальной навигационной спутниковой системы (ГЛОНАСС) и при разработке средств радиоэлектронной борьбы с системами типа GPS, показали, что в принципе возможно создание имитационной помехи, структура которой будет совпадать со структурой навигационного сигнала. Тогда помеха будет приниматься навигационным приемником как еще один сигнал спутника. В результате приемник будет вычислять ошибочные координаты своего местоположения.
В программном обеспечении навигационного приемника могут быть заложены способы выявления проводимой спуфинг-атаки. В наших управляемых авиабомбах такое предусмотрено. Поскольку бомбу трудно обнаружить заранее, противник вынужден передавать сигнал на резкое изменение направления ее полета. Это воспринимается системой управления как вредоносное вмешательство. Сразу следует выявление ложного сигнала и поиск истинного. В результате бомба возвращается на заданную траекторию.
Однако многие специалисты считают, что до сих пор любые меры, повышающие помехозащищенность спутниковых сигналов, малоэффективны или бесполезны в условиях применения средств радиоэлектронного противодействия. Кроме того, такие меры ведут к увеличению масс, габаритов приемников, их сложности и стоимости, а это особенно критично для высокоточного оружия.
Управление без глобальной навигации
Инерциальные системы управления. До появления спутниковой навигации и самолеты, и разнообразные ракеты имели инерциальные системы управления. Эти системы автономны, они не принимают никаких внешних сигналов, поэтому воздействовать на них невозможно. Они состоят из трех элементов — гироскопов (они определяют угловые скорости управляемого объекта), акселерометров (определяют кажущееся линейное ускорение) и высокопроизводительного вычислителя с математическими алгоритмами.
Посредством таких систем определяют координаты, скорость, ускорение движения любого объекта. Применяемые в них акселерометры измеряют ускорения по осям движения, по этим данным вычисляются скорости, а по ним и координаты. Недостаток этих систем в том, что погрешность определения местоположения растет пропорционально длительности движения объекта управления, например ракеты или дрона, поскольку оси гироскопов постепенно меняют свое положение в пространстве.
Лет 50 назад инерциальные системы были очень сложны, дороги, имели большие массы и габариты. Первый вариант практической инерциальной системы с бортовой электронно-вычислительной машиной, разработанный в США в начале 1960-х для автоматического управления самолетом, представлял собой несколько контейнеров, занимавших почти весь салон лайнера.
Однако развитие электроники и других технологий непосредственно повлияло и на инерциальные системы. Теперь в них применяются мощные, но компактные цифровые вычислители, миниатюрные гироскопы и акселерометры.
Инерциальные системы могут быть платформенными и бесплатформенными. В платформенных конструкциях акселерометры размещаются на специальном основании, которое сохраняет положение в пространстве благодаря работе гироскопов с быстро вращающимися роторами. Широкое применение платформенных систем обусловлено высокой точностью навигационных измерений. Уход осей гироскопов у них — от 0,001 градуса в час. Для примера: межконтинентальная баллистическая ракета, оснащенная таким устройством, пролетев за полчаса 8–10 тысяч километров, отклонится от цели всего лишь на несколько метров.
Конечно, это сложные, дорогие, большие и массивные устройства. Теперь их используют на такой технике, на которой не обязательно устанавливать небольшие инерциальные системы.
Для устранения навигационной ошибки дополнительно к инерциальным системам стали применять навигационное уточнение. Сначала — за счет ориентирования по звездам. Такое определение позволяет получить довольно точное местоположение, и ошибка в инерциальной системе устраняется. Но недостаток такого способа в том, что надо видеть звезды, а это не всегда возможно.
Затем появилась система навигации по рельефу местности, над которой пролегает траектория полета. Она может работать самостоятельно, но практически всегда, для надежности, вместе с инерциальной системой. Большинство крылатых ракет, наряду со спутниковой навигацией, оснащены такими устройствами.
Принцип работы основан на сопоставлении рельефа местности конкретного района нахождения ракеты с эталонными картами рельефа местности по маршруту ее полета. Информация об определенном рельефе местности в цифровой форме вводится в бортовую вычислительную машину (БВМ), где сопоставляется с данными о рельефе фактической местности, полученной с помощью высотомера на летательном аппарате и эталонных карт районов пролета. БВМ выдает сигналы коррекции для инерциальной подсистемы управления. Предусматривается и полет с обходом районов расположения стационарных средств ПВО и ПРО противника.
 Запуск ракеты ATACMS.
Запуск ракеты ATACMS.Такие системы подходят для не очень скоростных и довольно больших летательных аппаратов, например, для крылатых ракет. Но если говорить о баллистических или гиперзвуковых ракетах, они не годятся.
Бесплатформенные инерциальные системы (БИС). В бесплатформенных системах акселерометры, определяющие линейные ускорения и гироскопы, служащие для определения угловых скоростей вращения, закреплены на корпусе управляемого объекта. При этом вычислитель непрерывно рассчитывает отклонения относительно начального положения осей в пространстве сразу после включения в работу.
Сейчас в этих системах применяются гироскопы разных видов. Они не имеет подвижных частей, бесшумны, не требуют специального обслуживания, очень надежны, имеют малую массу и энергопотребление, сохраняя работоспособность при огромных перегрузках. Пока у них меньшие точности, чем у платформенных инерциальных систем с вращающимися роторами. Однако они применяются все больше, поскольку их можно устанавливать практически на любые движущиеся объекты.
Широко применяются инерциальные системы на летательных аппаратах, уже оборудованных спутниковой навигацией. Наличие обеих этих систем позволяет пользоваться сигналами глобального позиционирования, когда они есть и не являются ложными, и переходить на навигацию с использованием инерциальной системы, когда навигационных сигналов нет и в условиях помех.
В таком случае чаще всего управление только по данным инерциальной системы будет кратковременным, а поэтому достаточно точным. А при включении навигационного сигнала ошибка в инерционной системе обнуляется, потому что ее координаты и скорости будут взяты из точного навигационного сигнала.
В конце 1970-х годов выбор сделали в пользу применения в инерциальных системах оптических гироскопов. Первым был кольцевой лазерный гироскоп, а впоследствии — волоконно-оптический гироскоп. Они стали основой инерциальных навигационных систем различных подвижных объектов.
В волоконно-оптическом гироскопе установлена неподвижная многовитковая катушка диаметром 2–5 см с тонким оптическим волокном длиной около двух километров. Катушка является интерферометром, в котором распространяются посылаемые лазером встречные электромагнитные волны. Эти гироскопы обладают достаточной для большинства применений точностью. Они имеют уход осей от 0,001 градуса в час.
Другой широко применяемый тип микроэлектромеханических систем (МЭМС) — микроэлектромеханические гироскопы. Это разновидность одноосного гироскопа вибрационного типа. Основной принцип его работы — использование эффекта инерции упругих волновых колебаний осесимметричного резонатора. По малым колебаниям этого резонатора оценивается вектор углового движения подвижного основания, то есть корпуса летательного аппарата.
Когда объект вращается вокруг оси, возникают инерционные силы Кориолиса. Они заставляют колебаться резонатор с амплитудой, пропорциональной величине угловой скорости. Для примера, такое явление можно наблюдать при качании маятника Фуко, по колебаниям которого оценивается угловая скорость Земли. Самый большой такой маятник висел в прошлые времена под куполом Исаакиевского собора в Ленинграде. За время каждого качания маятника Земля немного проворачивается, и видно, на какой угол она повернулась.
Пока, как следует из открытых данных, эти устройства имеют уход осей от 0,01 градуса в час. Они бывают разных конструкций и могут иметь размеры от миллиметра и массу от полуграмма.
Гораздо более экзотический тип микрогироскопа основан на использовании в навигационных определениях ядерного магнитного резонанса (ЯМР). Интерес к ядерным (атомным) магнитным гироскопам (ЯМГ) возник в 2000-х годах в связи с потребностью в миниатюрных гироскопах навигационного класса точности и появлением новых технологий, обеспечивающих возможность миниатюризации ЯМГ.
Работа такого гироскопа основана на эффекте ЯМР. Использование ядерного спина для обнаружения инерционного вращения объясняет их внутреннюю высокую точность. Атомные гироскопы — это новый, недавно представленный тип атомных МЭМС. По-английски — compact nuclear magnetic gyroscope (NMRG). Немаловажным фактором для их использования на подвижных платформах была потенциальная стойкость ЯМГ к большим ускорениям и вибрациям.
Говорить о том, как именно устроен ядерный гироскоп, пригодный для установки на летательные аппараты, наверное, пока невозможно из-за закрытости сведений. Но есть некоторые данные об их принципиальных схемах.
Атомные гироскопы измеряют угол или угловую скорость, определяя реакцию гиперполяризованных ядер на инерциальное вращение. Известно, что ядра некоторых благородных газов обладают собственным магнитным моментом. Это может быть ксенон-129 или ксенон-131. Их ядра могут быть поляризованы по спину путем оптической накачки щелочного пара, который передает свою поляризацию ядрам через процесс, известный как спиновый обмен.
При этом возникает прецессия ядра (так называемая прецессия Лармора) вокруг линии магнитного поля. Если эта прецессия наблюдается в системе координат, которая вращается с некоторой угловой скоростью относительно инерциальной системы отсчета, то наблюдаемая частота будет разницей между скоростями прецессии Лармора и инерциального входа. Эту частоту можно обнаружить как модуляцию интенсивности света поляризованного луча, который проходит через образец. Свет собирается на фотодетекторе, и угловая скорость, пропорциональная сдвигу частоты, извлекается из полученного сигнала.
Как считают американские специалисты, гироскопы micro-NMRG дают качество ориентирования в пространстве, сравнимое с имеющимися на сегодняшний день моделями волоконно-оптических гироскопов, то есть лучших бесплатформенных гироскопов.
Сделано в России
Наверное, еще долго не придется говорить в подробностях в открытой печати о наших достижениях в области инерционных систем навигации. Но у нас есть основные их типы, спроектированные и изготовленные на высоком уровне. Наши разработчики исследуют возможности новых конструкций и схем. И мы видим результаты. Так, наши баллистические ракеты «Искандер» с точностью в несколько метров попадают в стационарные цели на максимальной дальности.
Судя по всему, иногда, при появлении оперативных данных разведки, требуется быстро нанести удар, и это хорошо получается. Кроме того, эти ракеты практически никогда не сбивает противник. Разнообразные ракеты воздушного базирования тоже отличаются высокой точностью. И крылатые ракеты «Калибр», запускаемые в том числе с кораблей и подводных лодок, не уступают им в надежности поражения целей.
Наше гиперзвуковое оружие тоже оснащено системами навигации очень высокого уровня, иначе оно не смогло бы попадать в заданные объекты на таких громадных скоростях. И такого вооружения у американцев еще нет. Тем не менее те же американцы прикладывают массу усилий и денег, чтобы изменить ситуацию в свою пользу. И это мы должны иметь в виду.
Сделано в США
В большинстве случаев открытой информации о характеристиках инерциальных систем, применяемых в американской военной технике и вооружениях, мало. И далеко не обо всех образцах таких систем известно. Тем не менее об основных используемых сейчас устройствах есть кое-какие сведения. Приведем некоторые примеры.
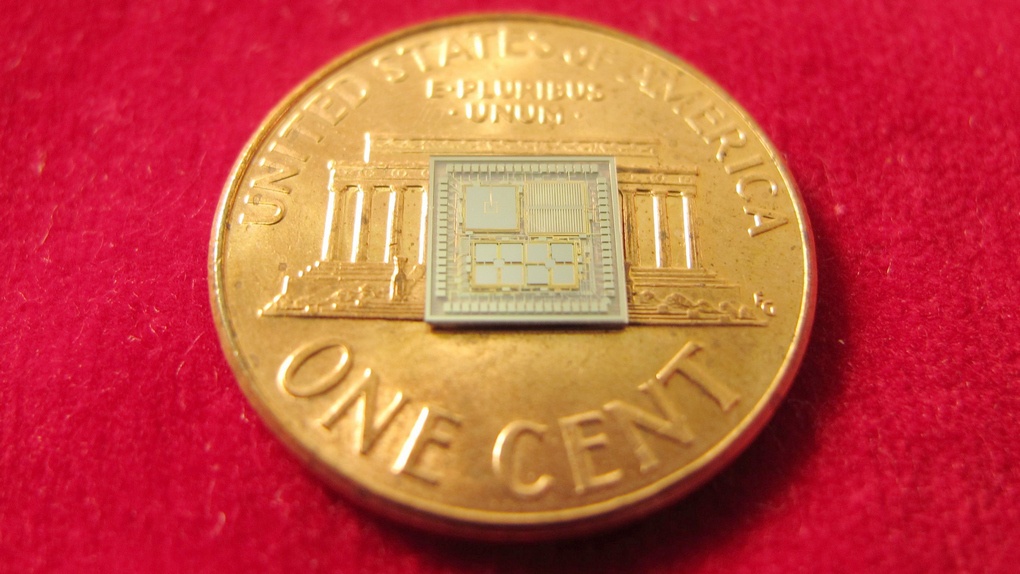 Микросхема TIMU.
Микросхема TIMU.В 2013 году в Мичиганском университете была создана микросхема TIMU для инерциальной навигации. Ее можно, в частности, размещать на боеприпасах малых калибров. TIMU представляет собой блок синхронизации и инерциального измерения МЭМС на одном кристалле. Гироскопы вибрационного типа и квазистатические акселерометры установлены в отдельных полостях посредством одного этапа склеивания, что позволяет сразу изготавливать и собирать трехосевые гироскопы.
В результате получена микросхема объемом 10 куб. мм, на которой размещены три гироскопа, три акселерометра и очень точные часы. Она состоит из шести слоев, каждый из которых не превышает 50 микрон в толщину. При этом каждый слой выполняет определенные функции. Микросхема принимает управление на себя тогда, когда спутниковый сигнал недоступен.
Ее преимуществами являются низкое электропотребление и возможность размещения в миниатюрном корпусе. К настоящему времени эта микросхема несколько раз модернизировалась.
 Запуск ракеты HIMARS.
Запуск ракеты HIMARS.На ракетах HIMARS (High Mobility Artillery Rocket System), судя по всему, тоже используется бесплатформенная инерциальная система на базе микроэлектромеханических вибрационных гироскопов с коррекцией по GPS. Она, по некоторым данным, имеет объем 1 куб. см.
Подобным же образом устроена система управления ракет ATACMS. Так, ракета MGM-164 ATACMS 2000 MOD имеет инерциальную систему и приемник GPS. При дальности 310 км ее среднее отклонение составляет 3 м.
Для сухопутных войск создана первая американская гиперзвуковая ракета PrSM (Precision Strike Missile). Она разработана для войсковых ракетных систем и запускается из модифицированных мобильных пусковых установок систем залпового огня М142 HIMARS и М270А2 MLRS. PrSM обладает скоростью полета в 5 махов (пять скоростей звука) и по этому показателю формально может считаться гиперзвуковой. Она оснащена твердотопливным ракетным двигателем и инерциальной системой управления с блоком спутниковой навигации. При этом обеспечивается точность в несколько метров при применении до 500 км. А при использовании только GPS заявлен промах не более 1 метра.
 Ядерная бомба США В61-12.
Ядерная бомба США В61-12.Новая ядерная бомба США В61-12 мощностью до 50 килотонн получила более совершенную систему наведения и управления. Теперь ее управляемая хвостовая часть снабжена инерциальной системой наведения, которая значительно повысит точность попадания в цель. Так, обычные бомбы, без ядерного заряда, с такой системой могут поражать цели с отклонением меньше 30 метров. Это существенно лучше, чем предыдущие результаты в 110–180 метров.
 Приземление капсулы миссии W-3.
Приземление капсулы миссии W-3.14 мая успешно завершилась миссия W-3 компании Varda Space Industries. Капсула, запущенная 14 марта 2025 года, доставила на Землю ценный груз. Это был инерциальный измерительный блок (IMU), созданный ВВС США совместно с компанией Innovative Scientific Solutions Incorporated. IMU, спроектированный для того, чтобы он выдерживал экстремальные условия повторного входа в атмосферу, прошел испытания на скоростях, превышающих 25 махов.
Успех Northrop Grumman
Вернемся к предположению, что фирма Northrop Grumman применила новый микрогироскоп на основе эффекта ядерного магнитного резонанса. Есть несколько признаков, позволяющих выдвинуть такую версию. По словам Джонатана Грина, главного технологического директора по развитию новых возможностей компании Northrop, успешная демонстрация технологии инерциального измерительного блока Advanced Hypersonic Technology на гиперзвуковом летательном аппарате, который может летать и маневрировать со скоростью 5 махов и выше, является первой в отрасли. Инерциальный измерительный блок разработан для того, чтобы высокоскоростные системы могли осуществлять навигацию без GPS.
«Он достиг всех наших целей... и тот факт, что он выдержал первые летные испытания, — все это невероятно позитивные события в плане того, как мы совершенствуем эту технологию», — сказал он.
Инерциальный измерительный блок вычисляет, где аппарат пролетел и какой путь ему нужно пройти, чтобы продолжить движение по своей траектории. По словам Джосея Чанга, старшего директора по передовым технологиям в Northrop Grumman Mission Systems, система вела себя так, как и ожидалось, во время летных испытаний и точно рассчитала траекторию движения гиперзвукового летательного аппарата. Из этого следует, что применена бесплатформенная гироскопическая система.
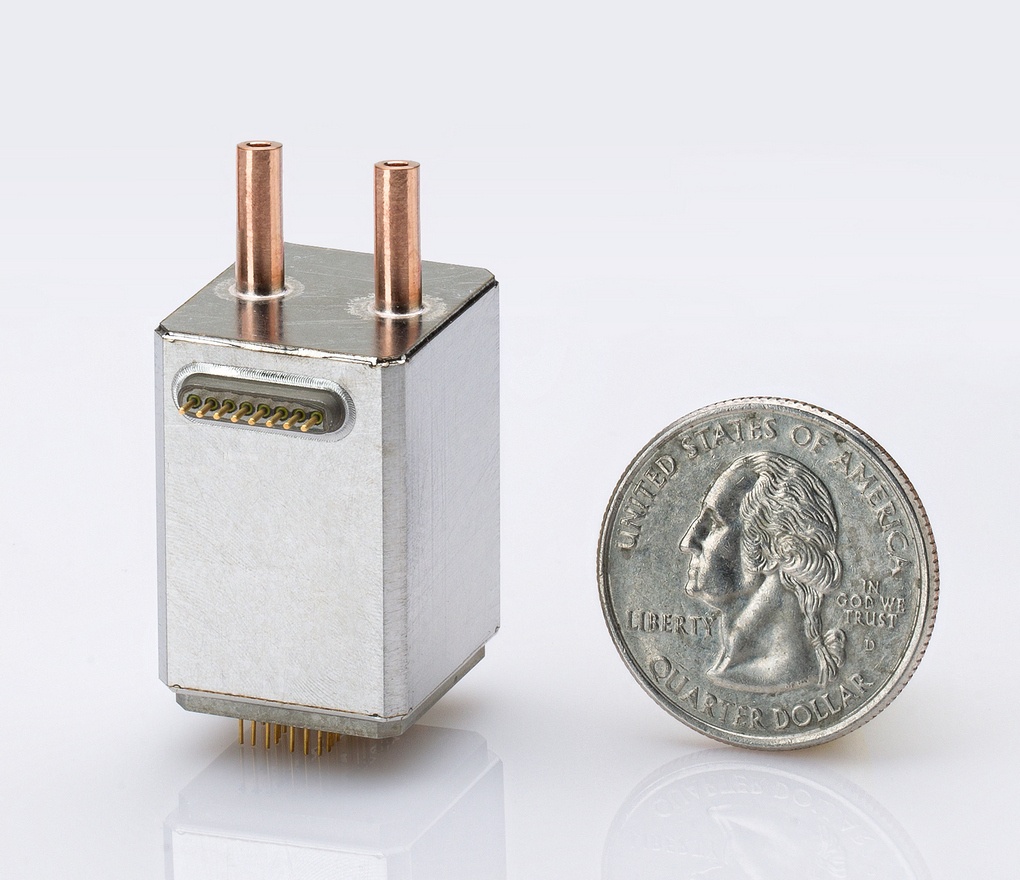
Остается вспомнить, что летом 2013 года Northrop Grumman разработала микрогироскоп — micro-NMRG. Прототип продемонстрировали представителям Управления перспективных оборонных исследований (DARPA), заказавшего создание этих новых устройств для использования в особо малых автономных объектах позиционирования. Тогда он имел размеры около 1,5х1,5х2,5 см. Такие устройства, несомненно, имеют большие перспективы из-за своей точности при компактных размерах.
Тем не менее другие уже существующие бесплатформенные инерциальные системы вполне могут устанавливаться на любые аппараты и боеприпасы вместе со спутниковыми приемниками. Тогда пусть и с несколько меньшей точностью, но цель будет поражена.